|
News
- 2026.01•🎉 UrbanVLA gets accepted to ICRA 2026.
- 2026.01•🎉 NavFoM gets accepted to ICLR 2026.
- 2025.11•I gave an invited talk at Yuanpei College, Peking University, introducing my work on urban micromobility.
- 2025.08•🎉 TrackVLA gets accepted to CoRL 2025.
Research
|
|
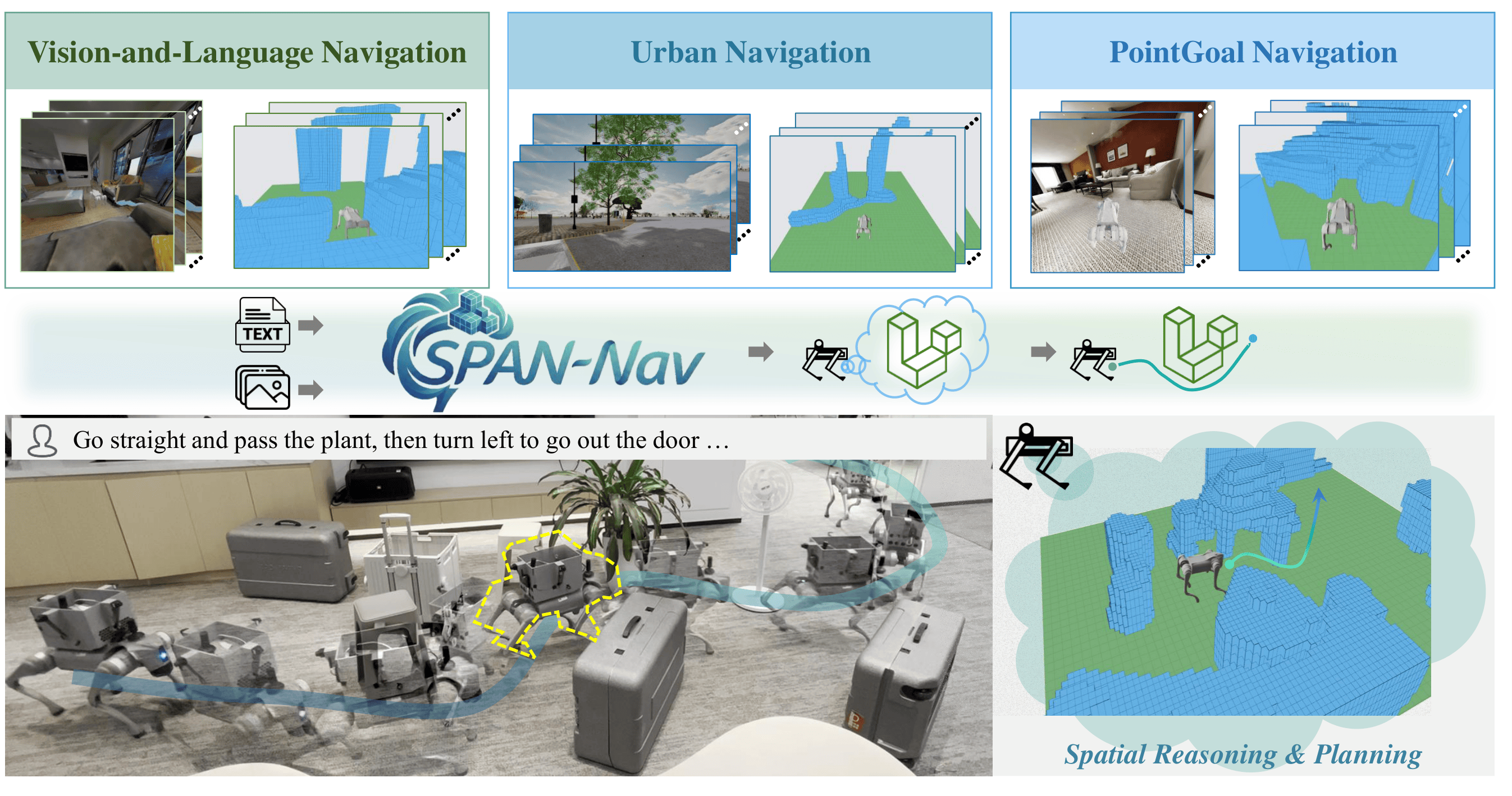
SPAN-Nav: Generalized Spatial Awareness for Versatile Vision-Language Navigation
Jiahang Liu*, Tianyu Xu*, Jiawei Chen*, Lu Yue*,
Jiazhao Zhang*, Zhiyong Wang*, Minghan Li, Qisheng Zhao,
Anqi Li, Qi Su,
Zhizheng Zhang†, He Wang†
ArXiv Preprint
SPAN-Nav is an end-to-end navigation model with universal 3D spatial awareness. It utilizes a single spatial token extracted from RGB video and a Spatial Chain-of-Thought mechanism to achieve robust path planning and obstacle avoidance in complex environments.
|
|
|
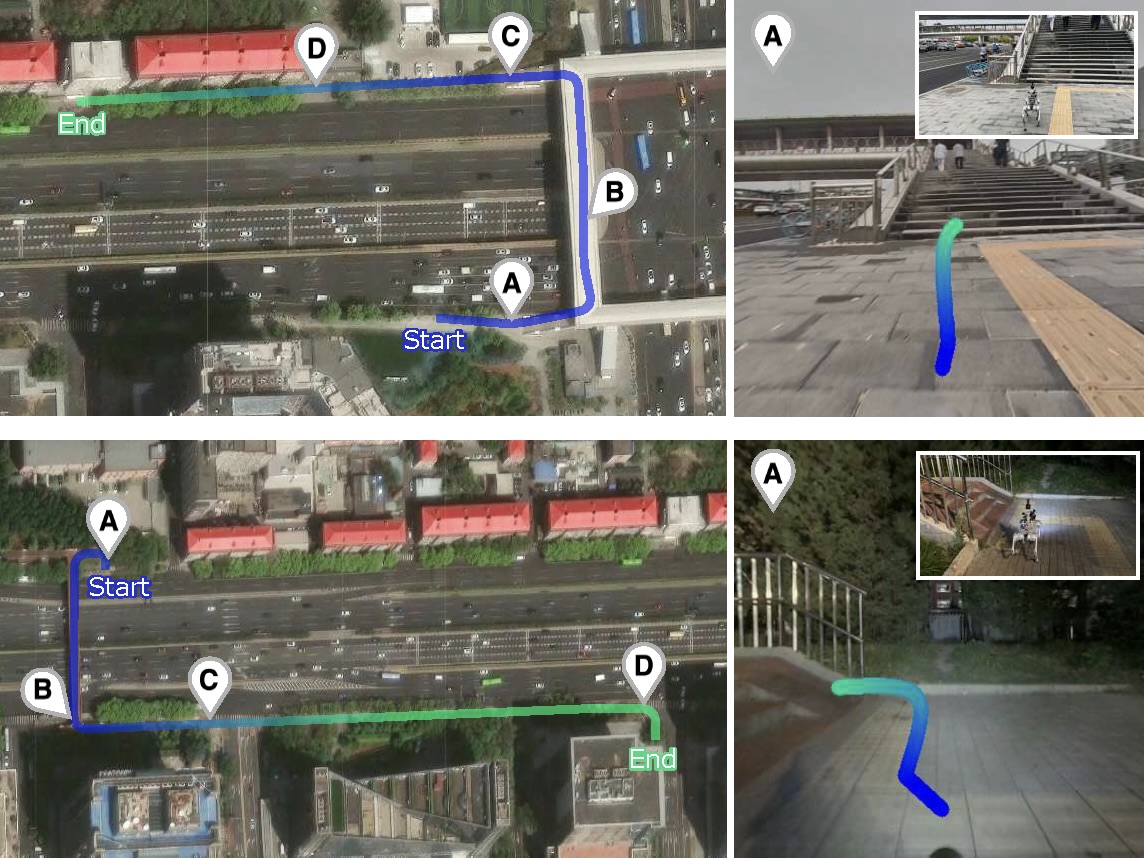
UrbanVLA: A Vision-Language-Action Model for Urban Micromobility
Anqi Li*, Zhiyong Wang*, Jiazhao Zhang*, Minghan Li,
Yunpeng Qi, Zhibo Chen, Zhizheng Zhang†, He Wang†
ICRA 2026
UrbanVLA is a route-conditioned vision-language-action model for urban micromobility. It aligns high-level navigation routes with visual observations to enable scalable, long-horizon navigation.
|
|
|
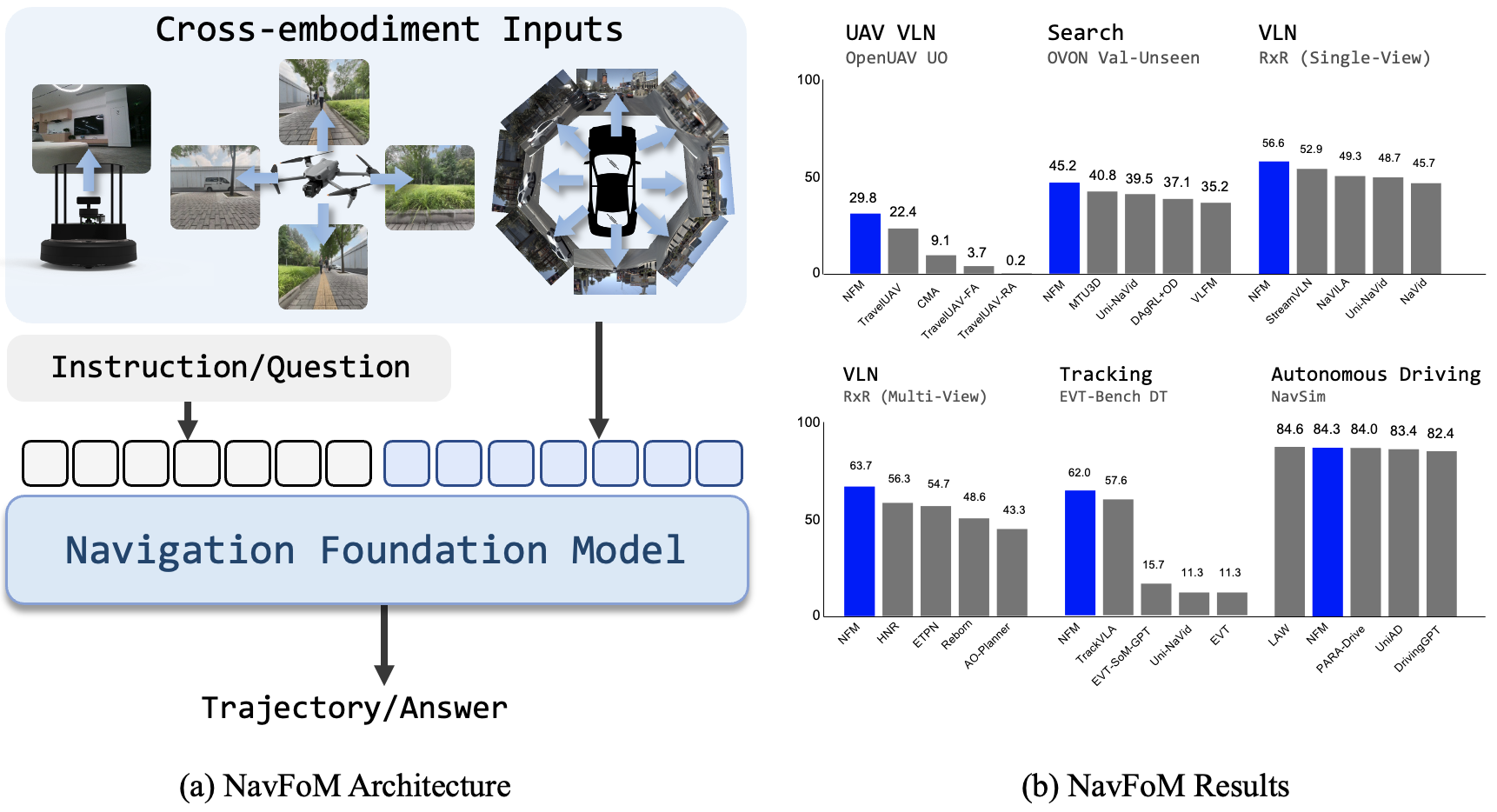
Embodied Navigation Foundation Model
Jiazhao Zhang*, Anqi Li*, Yunpeng Qi*, Minghan Li*, Jiahang Liu,
Shaoan Wang, Haoran Liu, Gengze Zhou, Yuze Wu, Xingxing Li, Yuxin Fan,
Wenjun Li, Zhibo Chen, Fei Gao, Qi Wu, Zhizheng Zhang†, He Wang†
ICLR 2026
NavFoM is a cross-embodiment and cross-task navigation model trained on 8 million samples encompassing quadrupeds, drones, wheeled robots, and vehicles, spanning tasks including vision-and-language navigation, object searching, target tracking, and autonomous driving.
|
|
|
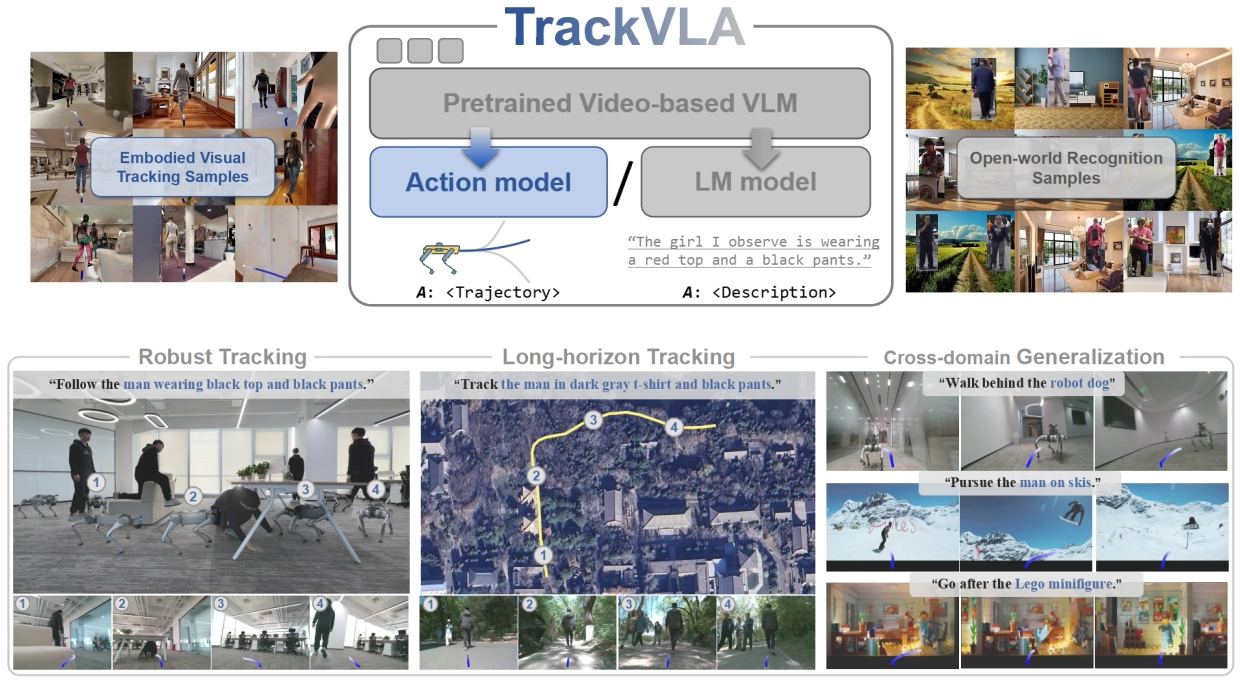
TrackVLA: Embodied Visual Tracking in the Wild
Shaoan Wang*, Jiazhao Zhang*, Minghan Li, Jiahang Liu,
Anqi Li, Kui Wu, Fangwei Zhong, Junzhi Yu,
Zhizheng Zhang†, He Wang†
CoRL 2025
TrackVLA is a vision-language-action model capable of simultaneous object recognition and visual tracking. It demonstrates robust tracking, long-horizon tracking, and cross-domain generalization across diverse challenging environments.
|
Experience
Miscellaneous
Outside of research, I have several hobbies.
- I enjoy playing basketball, and I am a huge fan of the NBA. My favorite player is Luka Dončić.
- I love performing on the trombone. I am an active member of the Symphony Orchestra at my high school, Experimental High School attached to Beijing Normal University. Check out our recent performance.
- I am a speedcuber. I participated in several speedcubing competitions held by the World Cube Association (WCA). Check out my WCA personal profile.
|